
HRS코리아 공개채용(신입/경력) 모집
모집 내용
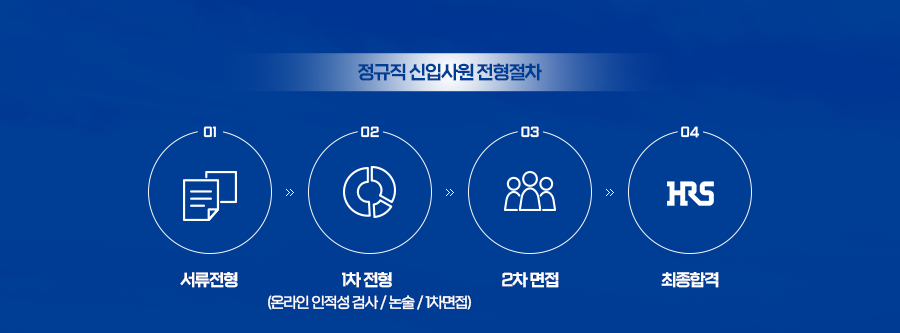
(1) 정규직 신입사원 모집
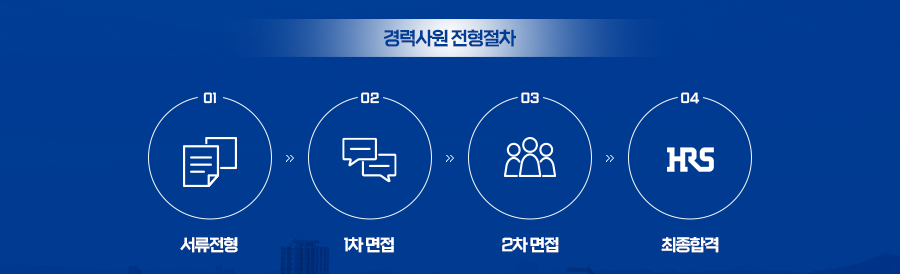
(2) 경력사원 모집
(3) 인턴사원(정규직 전환형) 모집
| 모집 부문 | 주요업무 | 자격요건 및 우대사항 |
|---|---|---|
| 제품 개발 |
|
|
| 설비 개발 |
|
|
| 금형 개발 |
|
|
| 국내 영업 |
|
|
| 해외 영업 |
|
|
| 공정 관리 |
|
|
| 품질 보증 |
|
|
| 구매 관리 |
|
|
- 공통 지원자격 : 대학교(4년제) 졸업자 또는 졸업예정자
- 근로조건 : 정규직(입사 후 수습기간 3개월)
- 급여수준 : 연 4,370만원(대졸, 군필자 기준)
성과급 별도 지급(최근 5개년 평균 통상임금의 500% 지급, 회사 실적에 따라 상이함)
(2) 경력사원 모집
| 모집부문 | 주요업무 | 자격요건 및 우대사항 |
|---|---|---|
| 모션제어 개발 |
|
|
| 머신비젼/ 영상처리 개발 |
|
|
| PLC 제어 |
|
|
| 제품개발 |
|
|
| IT |
|
|
| 방전가공 |
|
|
| PRESS금형 엔지니어 및 Operator |
|
|
- 근로조건 : 정규직(수습기간은 회사내규에 따름)
- 급여수준 : 면접 후 협의에 따라 결정
(3) 인턴사원(정규직 전환형) 모집
| 모집부문 | 주요업무 | 자격요건 및 우대사항 |
|---|---|---|
| 제조 |
|
|
| 정밀가공 |
|
|
- 지원자격 : 전문대학(2년제) 졸업자 또는 졸업예정자 / 고등학교 졸업자
- 근로조건 : 정규직 전환형(6개월 근무 후 정사원 전환, 현재까지 정사원 전환율 100%)
- 급여수준
- 인턴 근무 시 : 연 3,300만원 ~ 3,800만원 수준 (개인별 연장 및 휴일근무에 따라 변동될 수 있음)
- 정규직 전환 시 : 연 4,500만원 ~ 5,300만원 (성과급 포함, 개인별 연장 및 휴일근무에 따라 변동 될 수 있음)
정규직 전환 시 : (성과급의 경우 최근 5개년 평균 통상임금의 500% 지급, 회사 실적에 따라 상이함)
공통 사항
- 남자일 경우 병역 필 또는 면제자
- 해외 여행 및 건강상 결격 사유가 없는 자
- 취업보호대상자는 관련 법령에 의거 우대(장애등급 보유자, 보훈대상자 포함)

채용 일정
(1) 정규직 신입사원
(2) 경력사원 및 인턴사원(정규직 전환형)
| 구분 | 일정 |
|---|---|
| 입사지원서 접수 | 01.17(금) ~ 02.02(일) / 17일 |
| 서류 합격자 발표 | 02.11(화) |
| 온라인 인적성 검사 | 02.11(화) ~ 02.16(일) |
| 1차 전형 | 02.17(월) ~ 02.21(금) |
| 1차 전형 합격자 발표 | 02.26(수) |
| 2차 전형 | 03.04(화) ~ 03.12(화) |
| 최종 합격자 발표 | 03.17(월) |
| 입 사 | 03.24(월) |
(2) 경력사원 및 인턴사원(정규직 전환형)
| 구분 | 일정 | 비고 |
|---|---|---|
| 입사지원서 접수 | 01.17(금) ~ 02.02(일) / 17일 | |
| 서류 합격자 발표 및 면접 진행 | 2월 초 ~ 2월 중순 | 개별통보예정 ※ 각 부문별로 면접일자 상이 |
| 입 사 | 2월 말 | 개별통보예정 ※각 부문별로 입사일정 상이 |
- 상기 채용 진행일정은 당사 사정에 의해 변경 될 수 있으며, 변경 시 공지 예정입니다.
지원 방법(http://hirose.career.greetinghr.com 에서 온라인 지원)
- 채용중인 공고 → 공고 선택 → 지원하기 → 작성 → 최종제출
- 작성 내용 및 제출 서류에 허위 사실이 있을 시, 입사가 취소 될 수 있습니다.
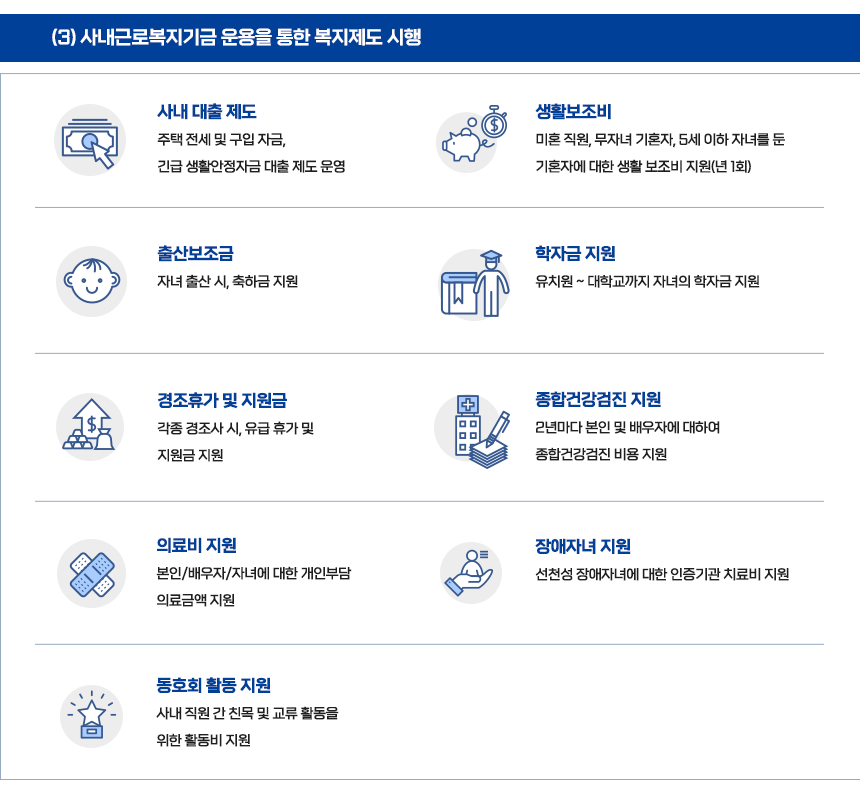
복지제도

문의처
- 담당자 : 인사&기획팀 인사파트 채용담당자
- 연락처 : ***-****-****
- E-mail : ******@*******.***
